【完美体育·(中国)手机网页版MYD-Y6ULX-V2开发板】驱动步进电机
| 文章来源: 发布日期:2023.3.15 浏览次数:607 次 |
由评测者“华仔stm32”提供。
工控板驱动步进电机,是项目中常用的场景。今天试着用三个IO驱动步进电机:
【硬件准备】
1、开发板。
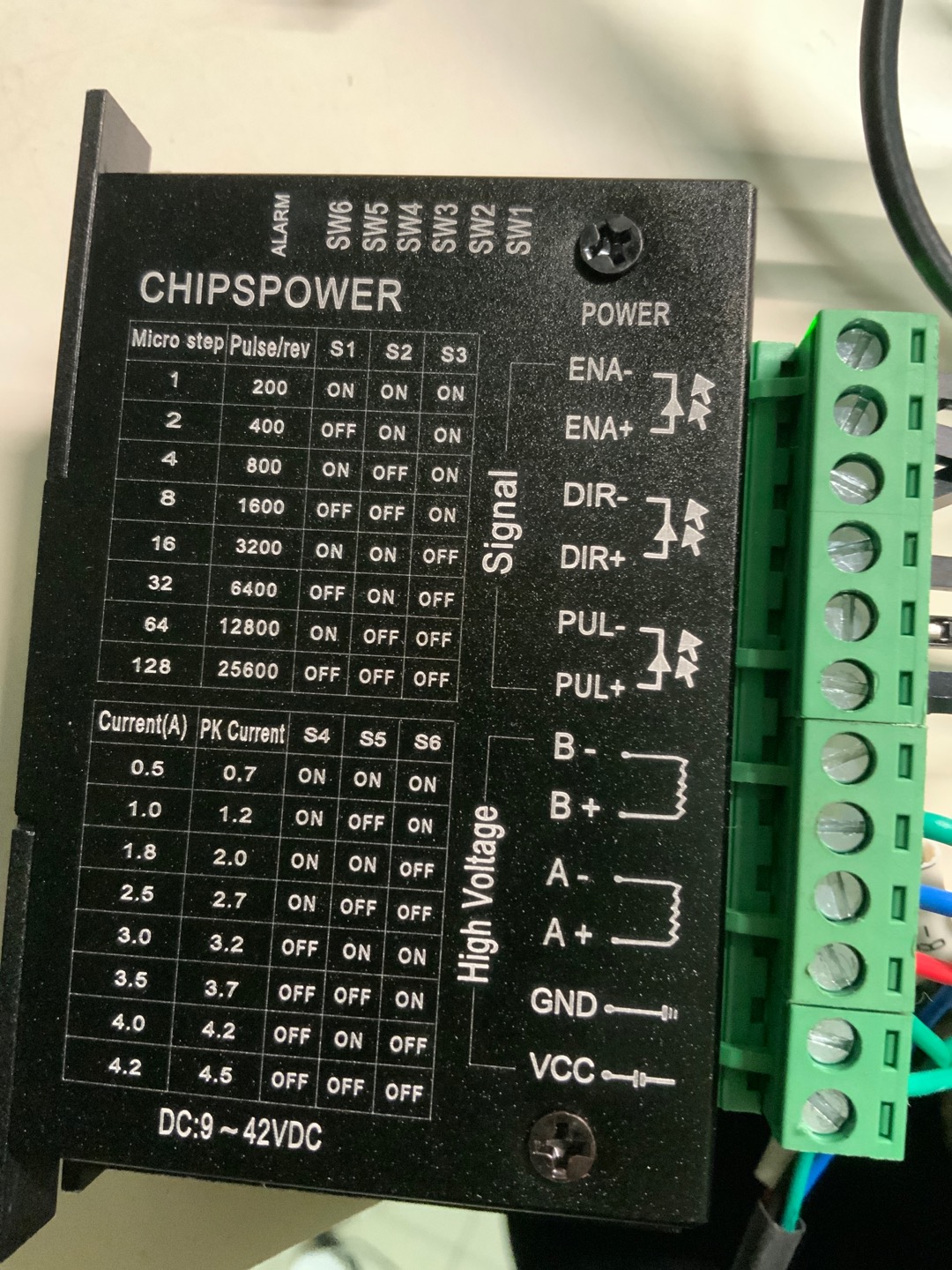
2、步进电机驱动器,前面活动中申请到【免费试用13期】TB5128FTG步进电机驱动套件
3、步进电机一个。
4、杜绑线。
5、可调数控电源。
【接线原理图】

【程序】
#include#include #include #include #include #include FILE *fp=NULL; int init_io(void) { fp = fopen("/sys/class/gpio/export", "w"); if (fp == NULL) { perror("fopen"); return -1; } fprintf(fp,"%d",24); fclose(fp); fp = fopen("/sys/class/gpio/export", "w"); if (fp == NULL) { perror("fopen"); return -1; } fprintf(fp,"%d",25); fclose(fp); fp = fopen("/sys/class/gpio/export", "w"); if (fp == NULL) { perror("fopen"); return -1; } fprintf(fp,"%d",26); fclose(fp); fp = fopen("/sys/class/gpio/gpio24/direction","w"); fprintf(fp,"out"); fclose(fp); fp = fopen("/sys/class/gpio/gpio25/direction","w"); fprintf(fp,"out"); fclose(fp); fp = fopen("/sys/class/gpio/gpio26/direction","w"); fprintf(fp,"out"); fclose(fp); } void io_ena(int value) { fp = fopen("/sys/class/gpio/gpio26/value", "w"); fprintf(fp,"%d", value); fclose(fp); } void io_Dir(int value) { fp = fopen("/sys/class/gpio/gpio25/value", "w"); fprintf(fp,"%d", value); fclose(fp); } void close_IO(void) { fp = fopen("/sys/class/gpio/unexport","w"); fprintf(fp,"%d",24); fclose(fp); fp = fopen("/sys/class/gpio/unexport","w"); fprintf(fp,"%d",25); fclose(fp); fp = fopen("/sys/class/gpio/unexport","w"); fprintf(fp,"%d",26); fclose(fp); } void pwm_PULL(int times) { int i; for (i = 0; i < times; i++) { fp = fopen("/sys/class/gpio/gpio24/value", "w"); fprintf(fp,"%d", 1); usleep(10); fclose(fp); fp = fopen("/sys/class/gpio/gpio24/value", "w"); fprintf(fp,"%d", 0); usleep(10); fclose(fp); } } int main(void) { init_io(); io_ena(1);//diable en io_Dir(1); //正转 io_ena(0); pwm_PULL(500); sleep(1); io_Dir(0); //正转 pwm_PULL(500); close_IO(); return 0; }
编译上传开发板,运行程序,就可以实现电机的正反转。
 产品中心
产品中心 服务与支持
服务与支持 关于完美体育·(中国)手机网页版
关于完美体育·(中国)手机网页版 联系我们
联系我们 关注我们
关注我们
手机网页版天猫官方旗舰店")


手机网页版B站帐号")




手机网页版")
